Shoulder device

Property of Wyss Institute (https://wyss.harvard.edu/technology/soft-wearable-shoulder-assistive-device/)
my role
I worked in a small team of 2 designers (including myself), bioengineer, and occupational therapist on soft robotic pneumatic shoulder device. The device is design to help people with upper body impairments to perform every day activities by providing them with a sufficient range of motion. The challenge of this work was to create a balance between the strength of actuators, smoothness of performance, and transparency of the wearable device for a maximum comfort as well as user satisfaction.
Starting this job I had a passion for improving every day life for people with impairments, but I did not know much about sewing and designing actuators. Thanks to the cross-disciplinary lab environment I was able to learn not only those hard skills but also how to work with people of different specialities.
A major part of the work was testing devices on users and collecting quantitative and qualitative data, which was a base for improvements.
More information here:


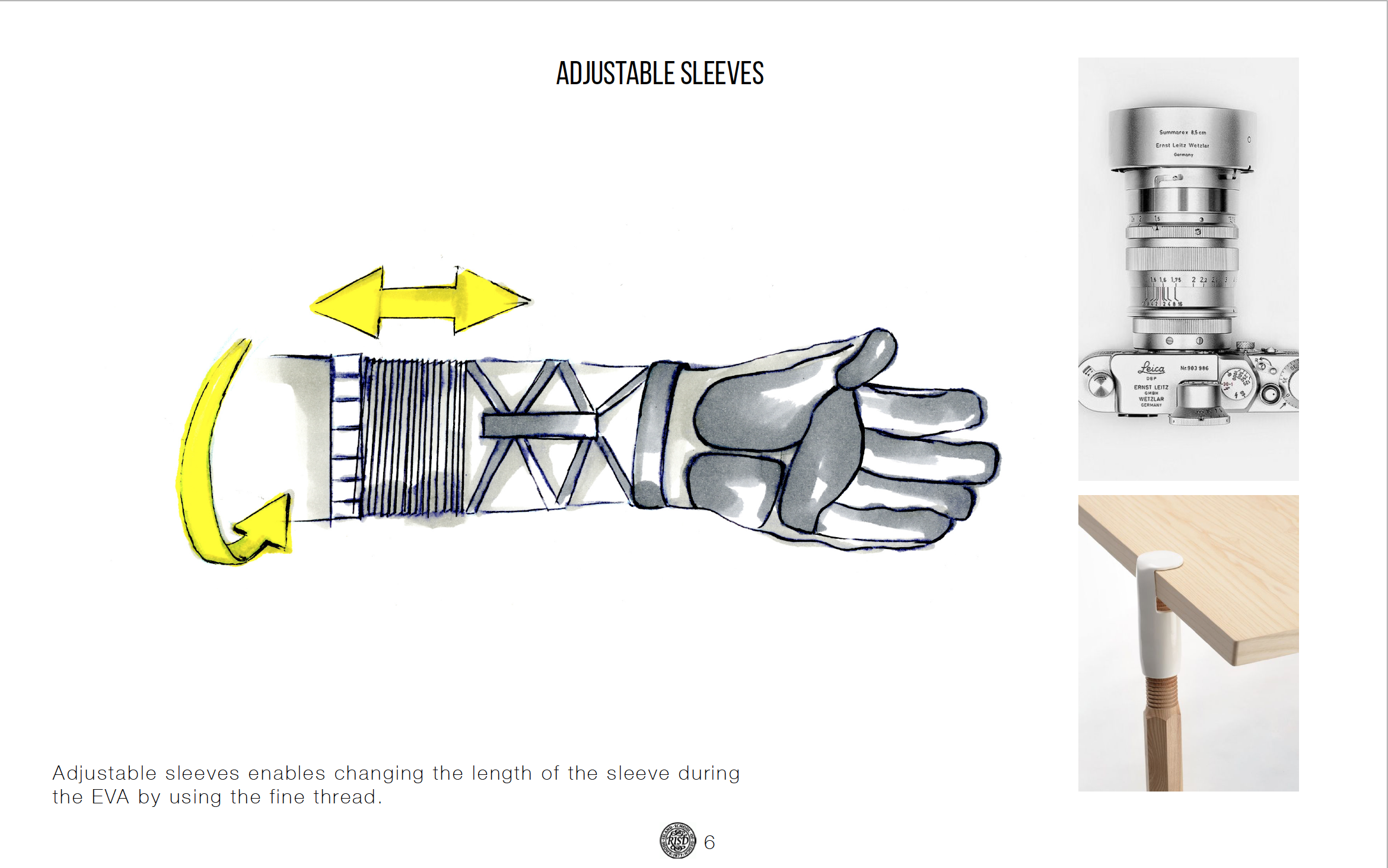
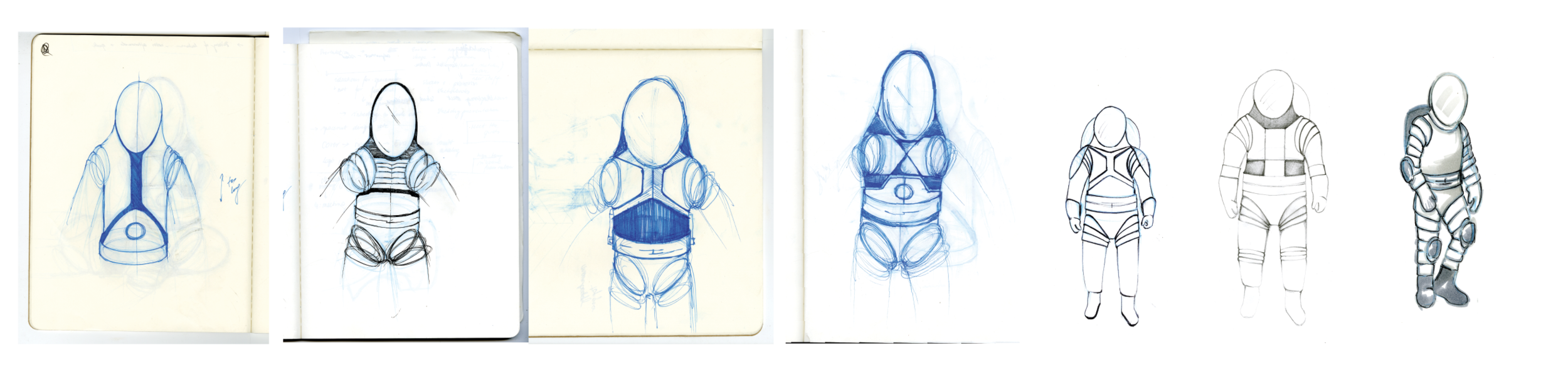
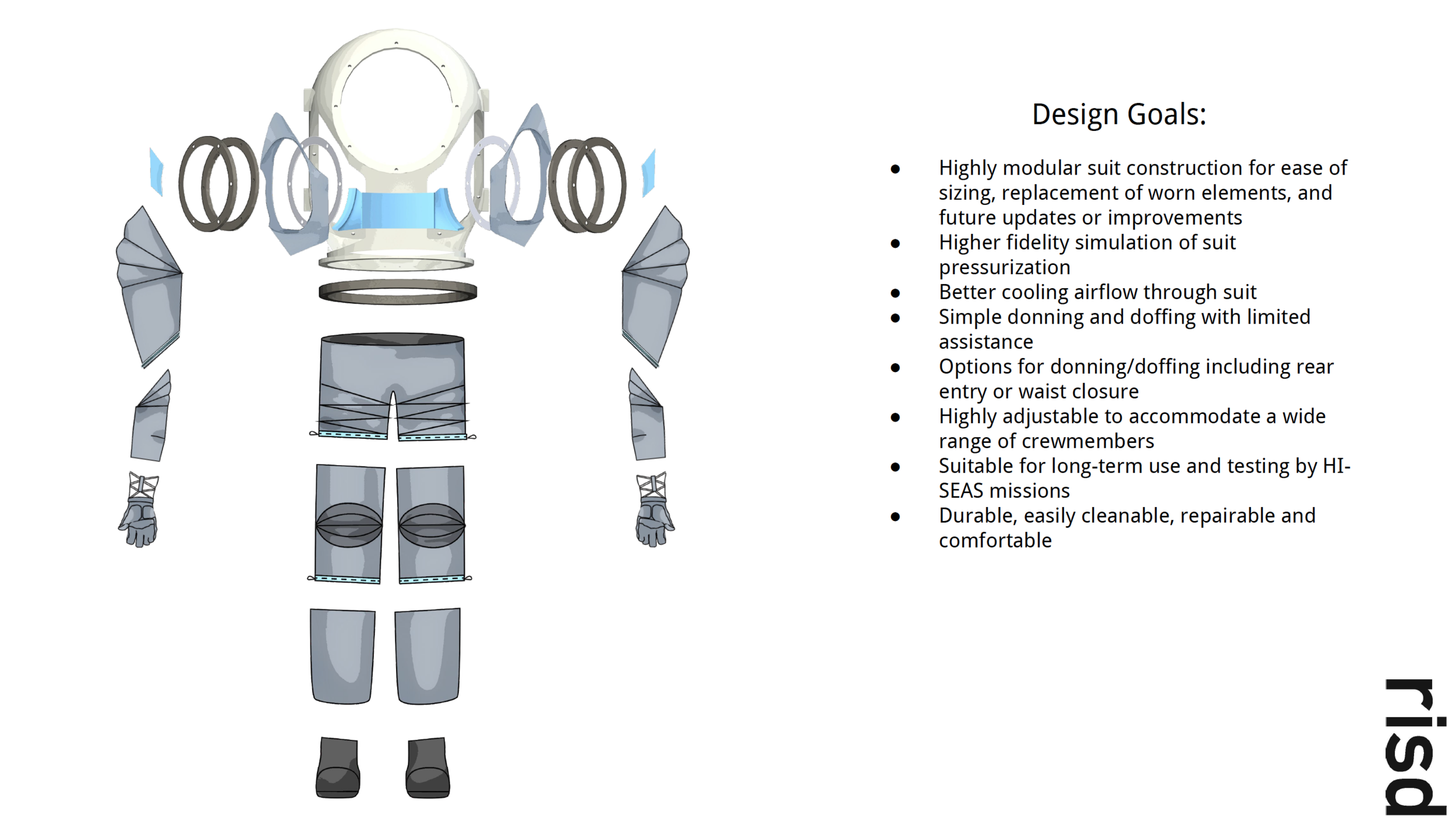
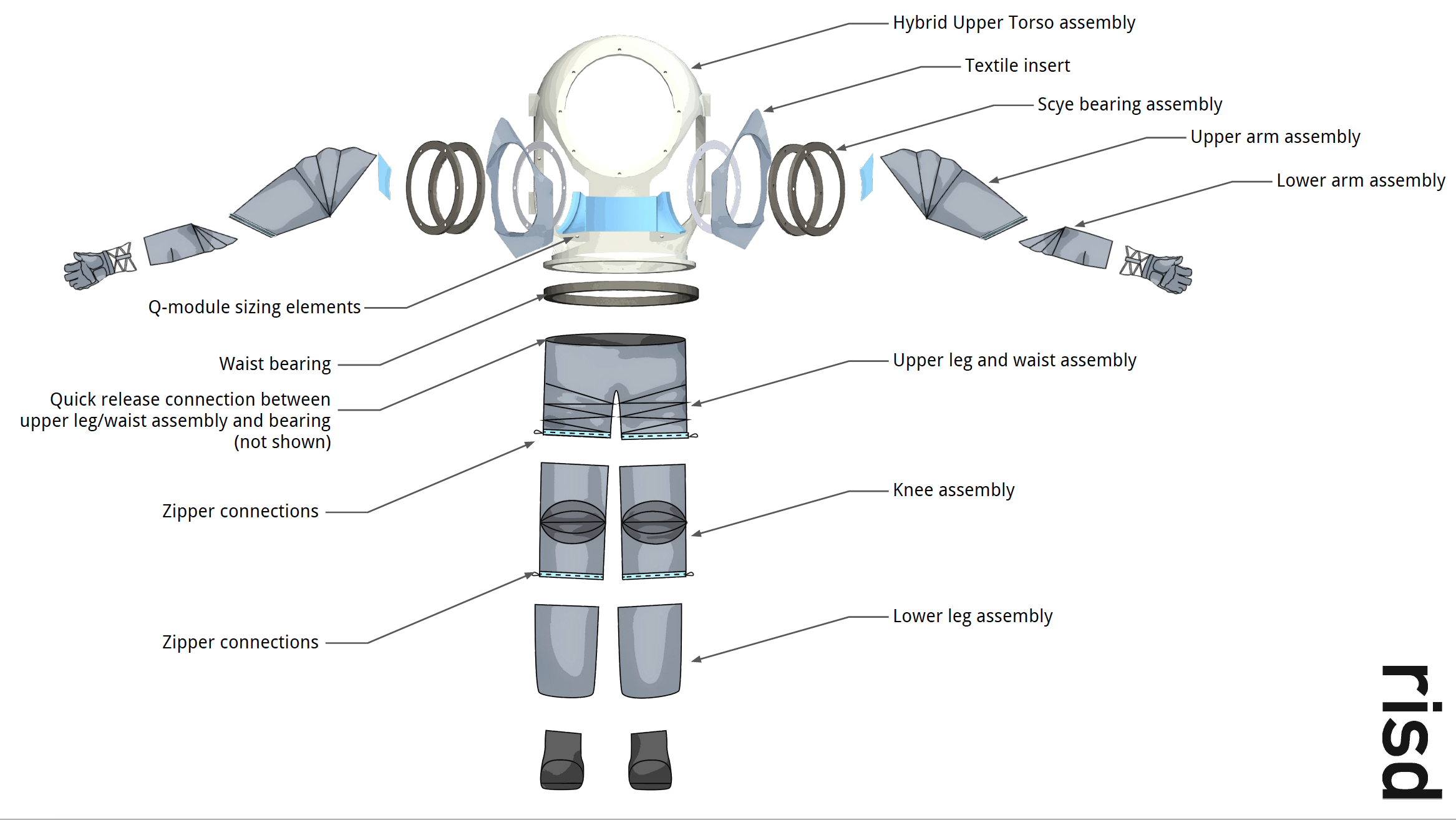
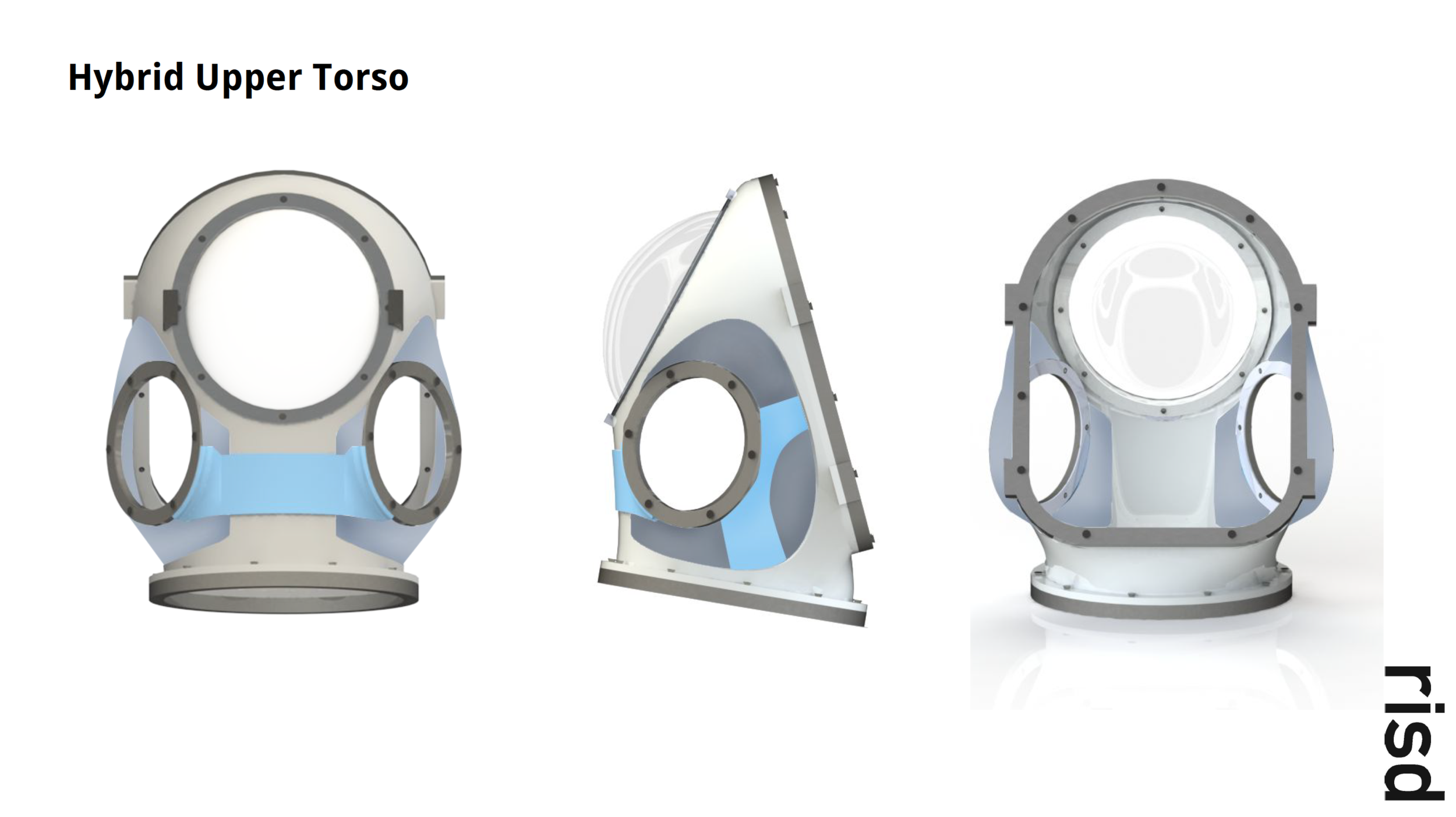
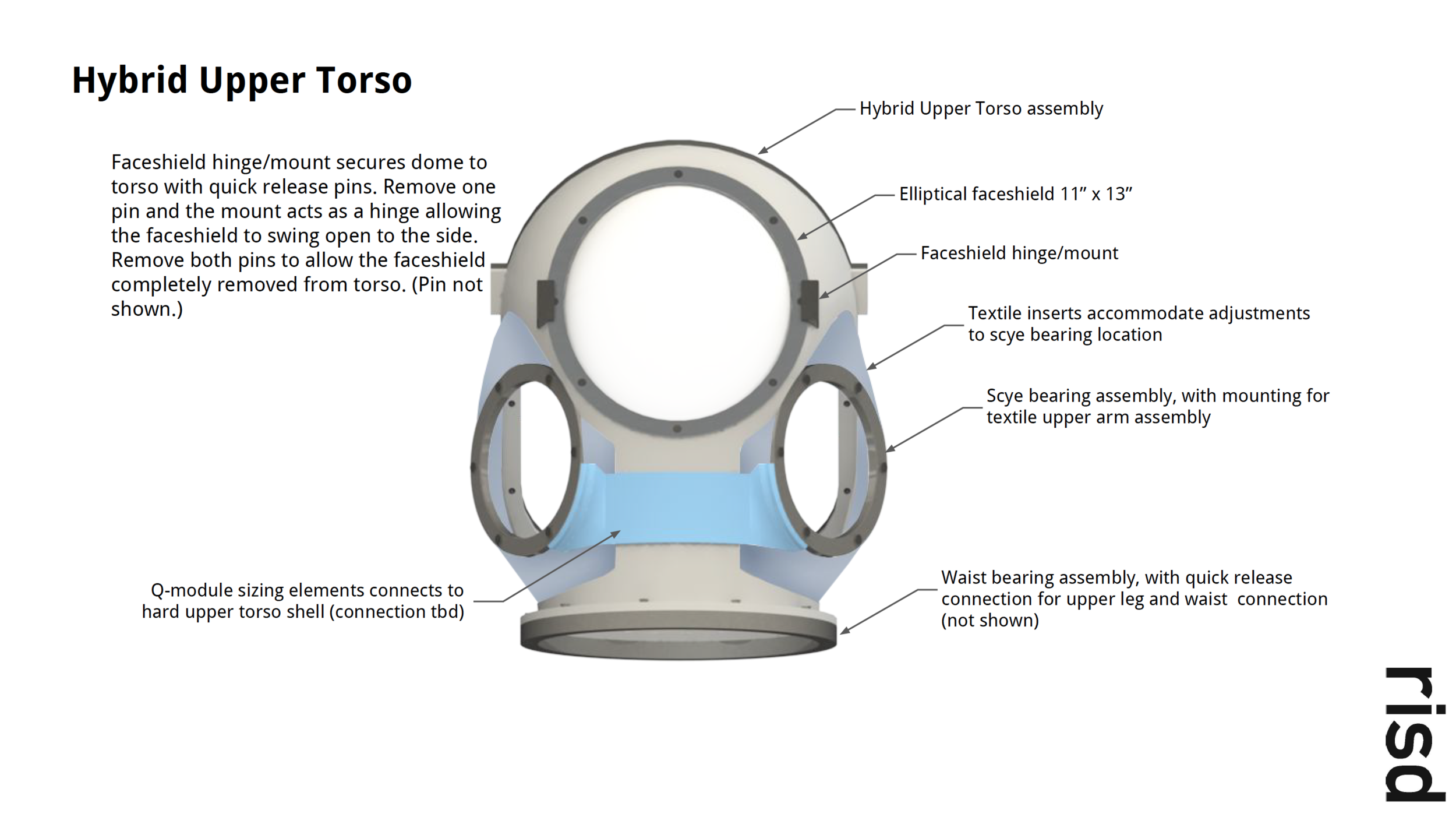
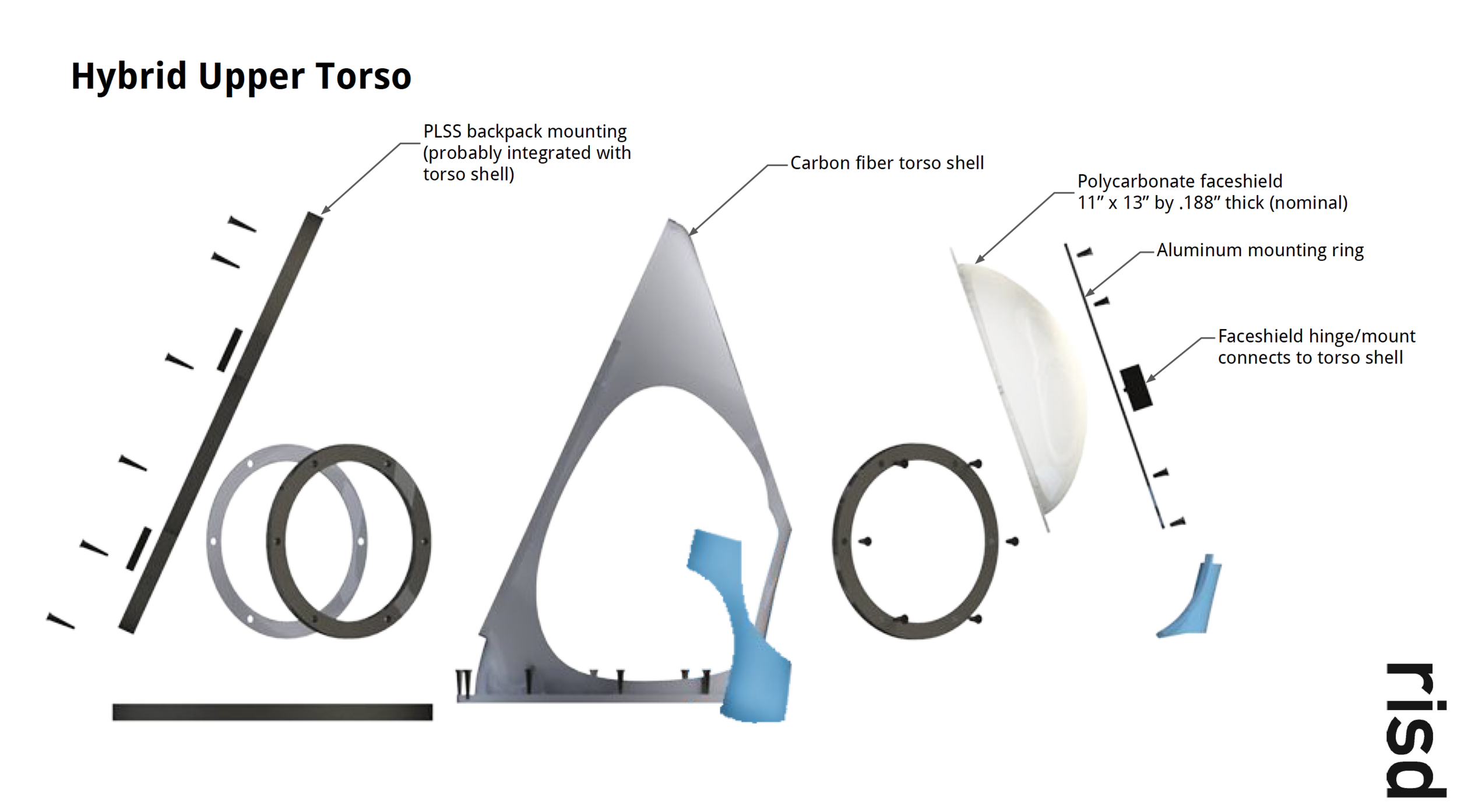
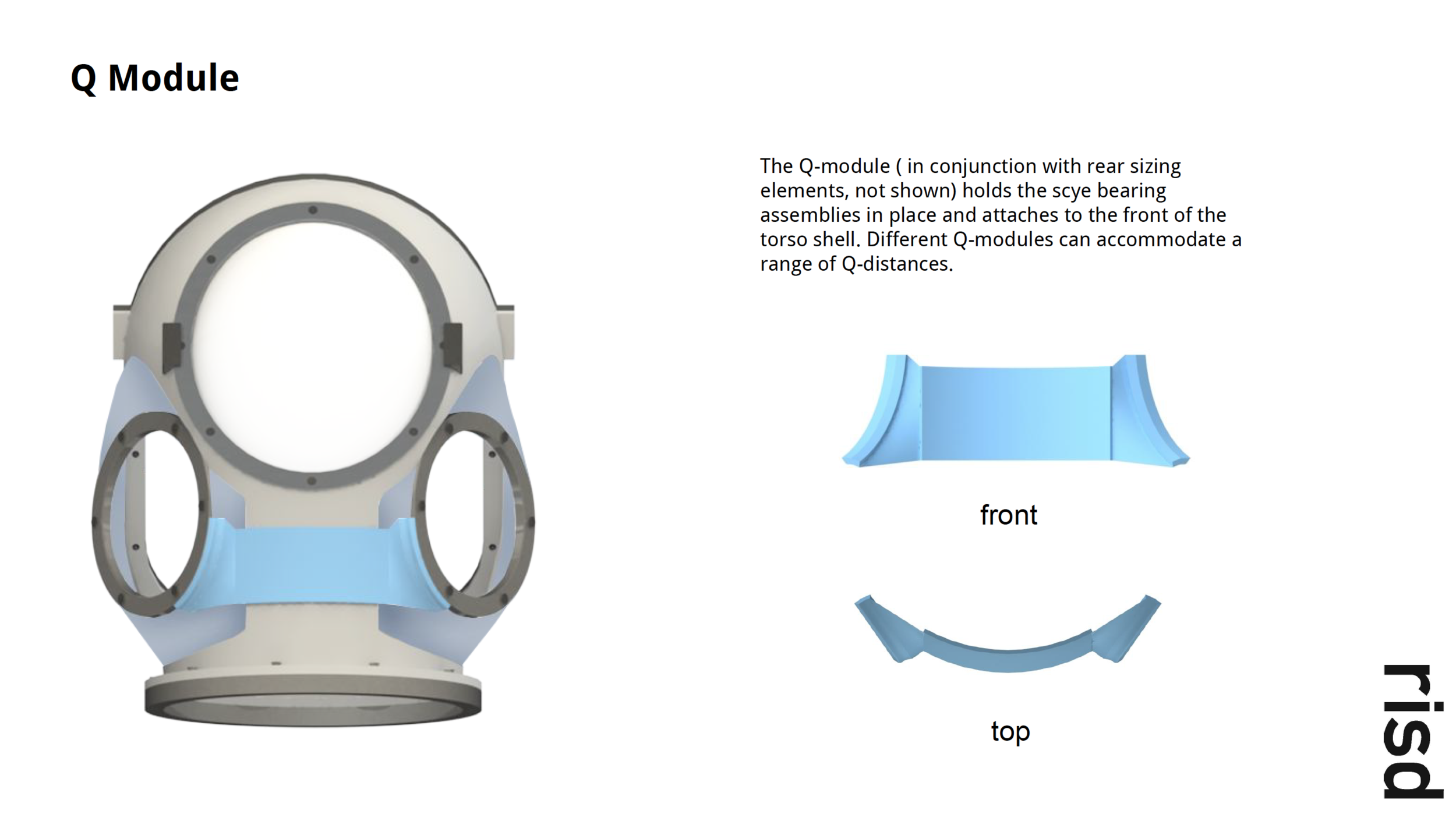
Spacesuit simulation for the
pre-Mars training purpose
Research Assistant for Michael Lye at RISD.
Creating realistic simulation of the spacesuit experience for the NASA HI-SEAS mission. We designed the suit that will provide astronauts in training on Earth with the feeling of being in space. Working on the suit was extremely valuable for my work because all people are disable in space – which makes spacesuit an ultimate assistive technology.


Andrzej Steward - Hi-SEAS crew member - wearing the suit.


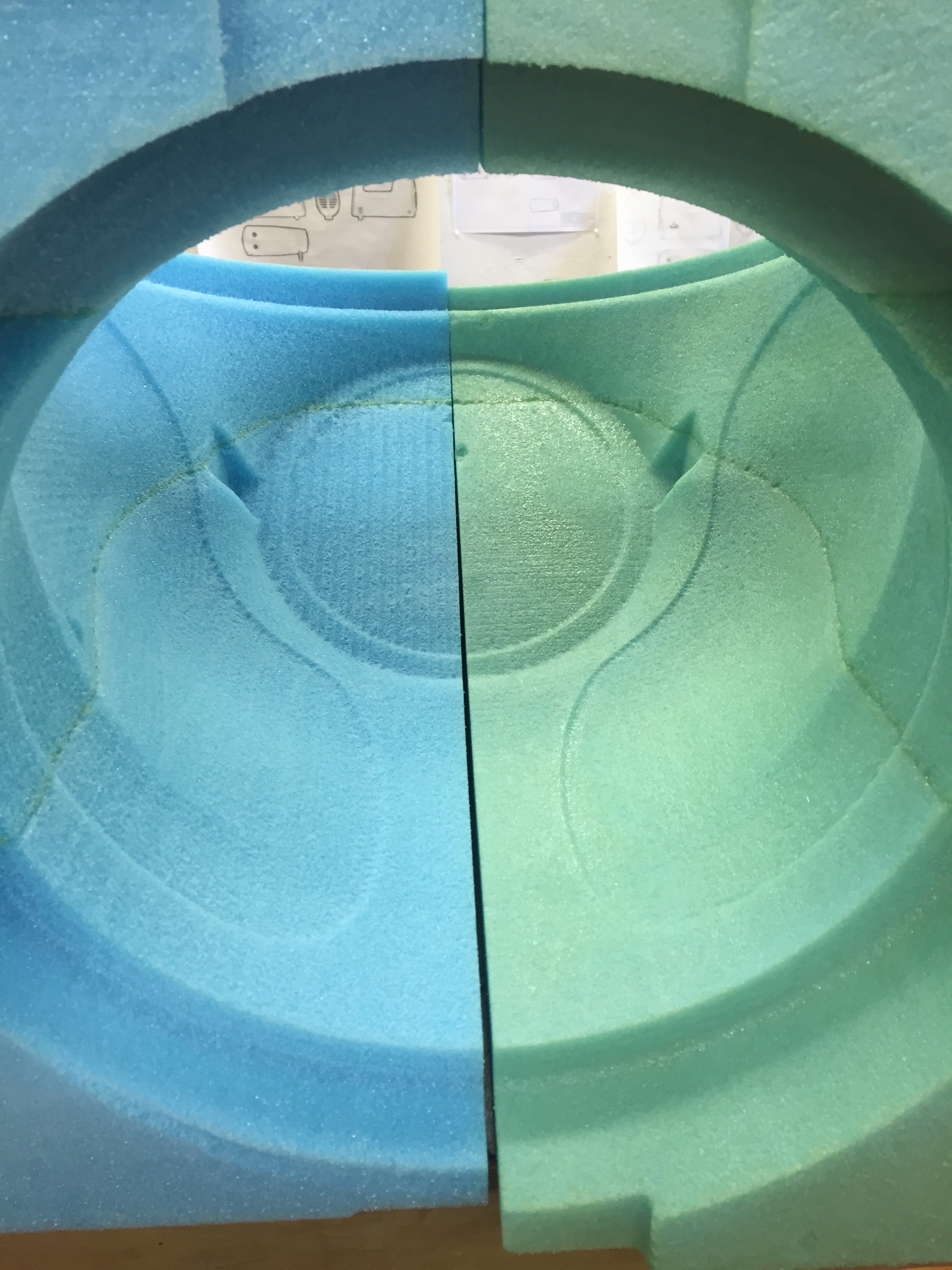

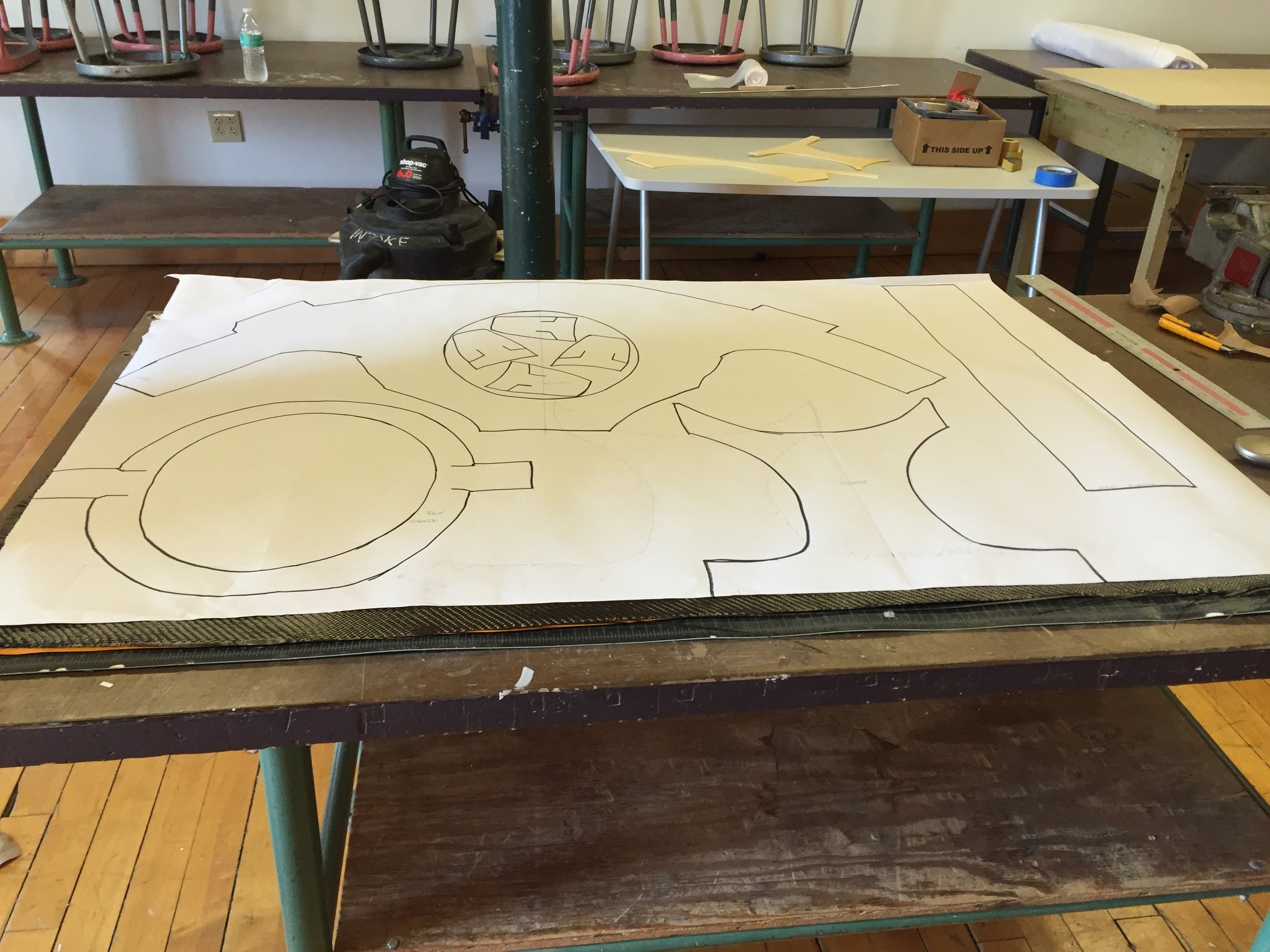




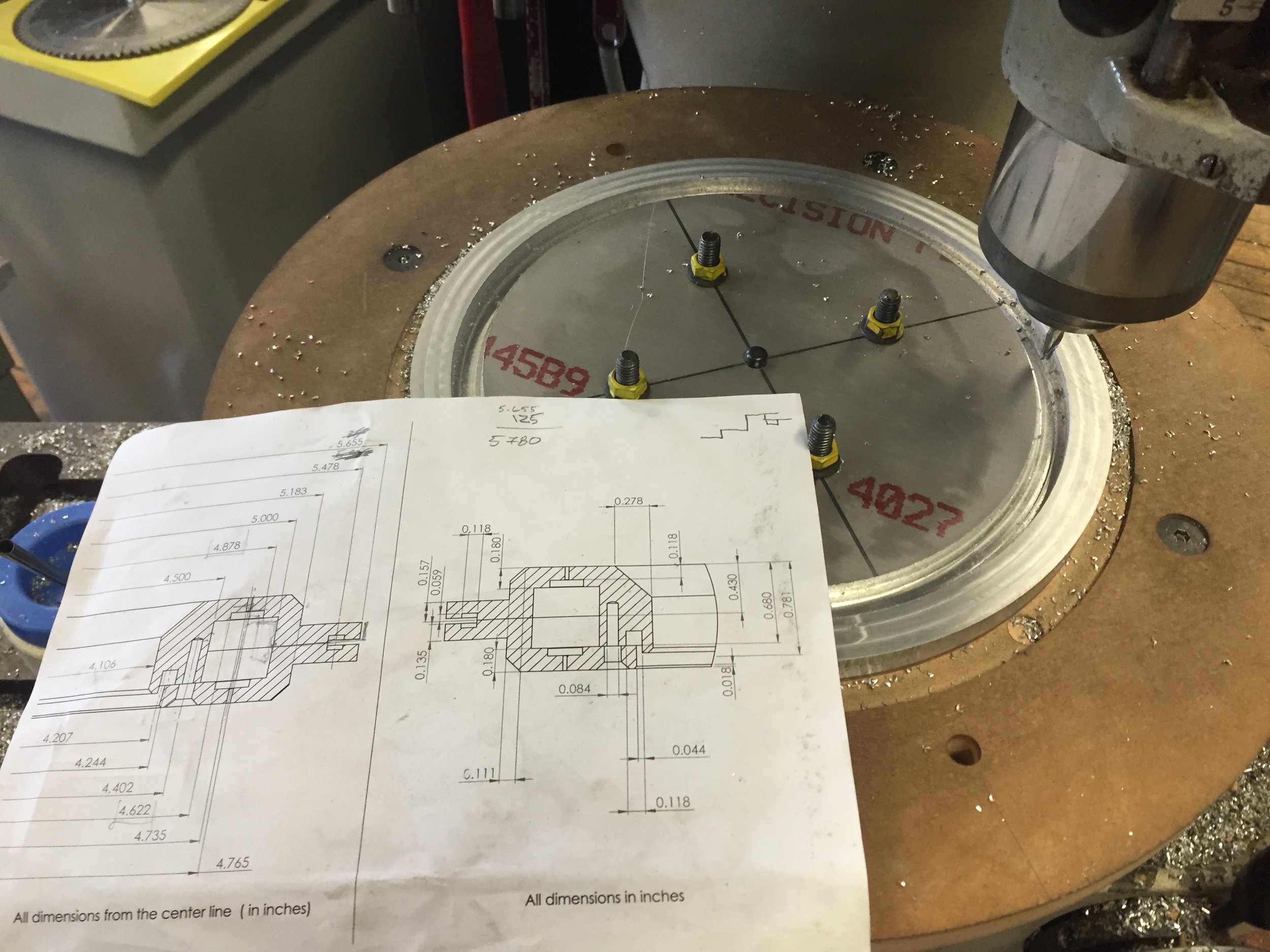
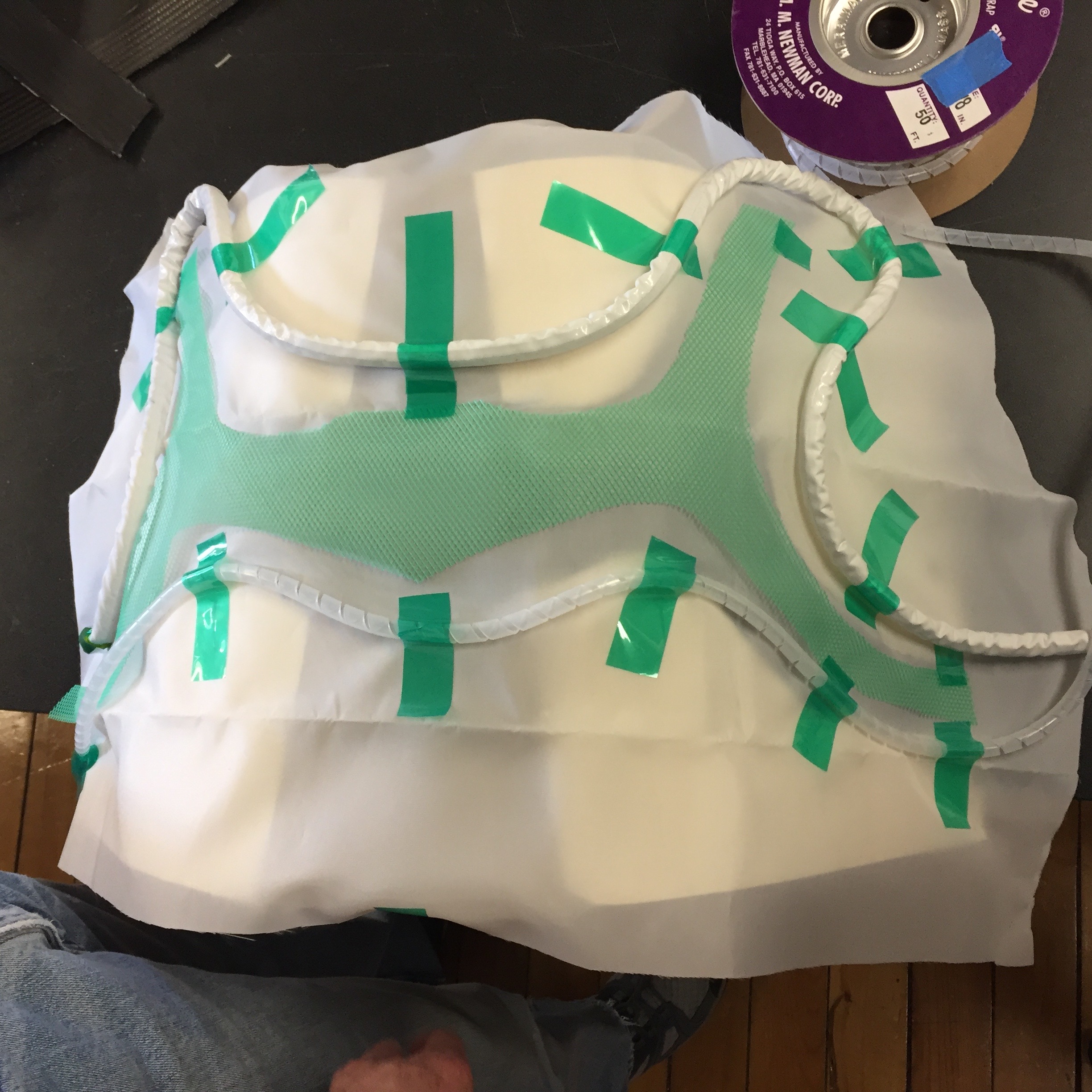
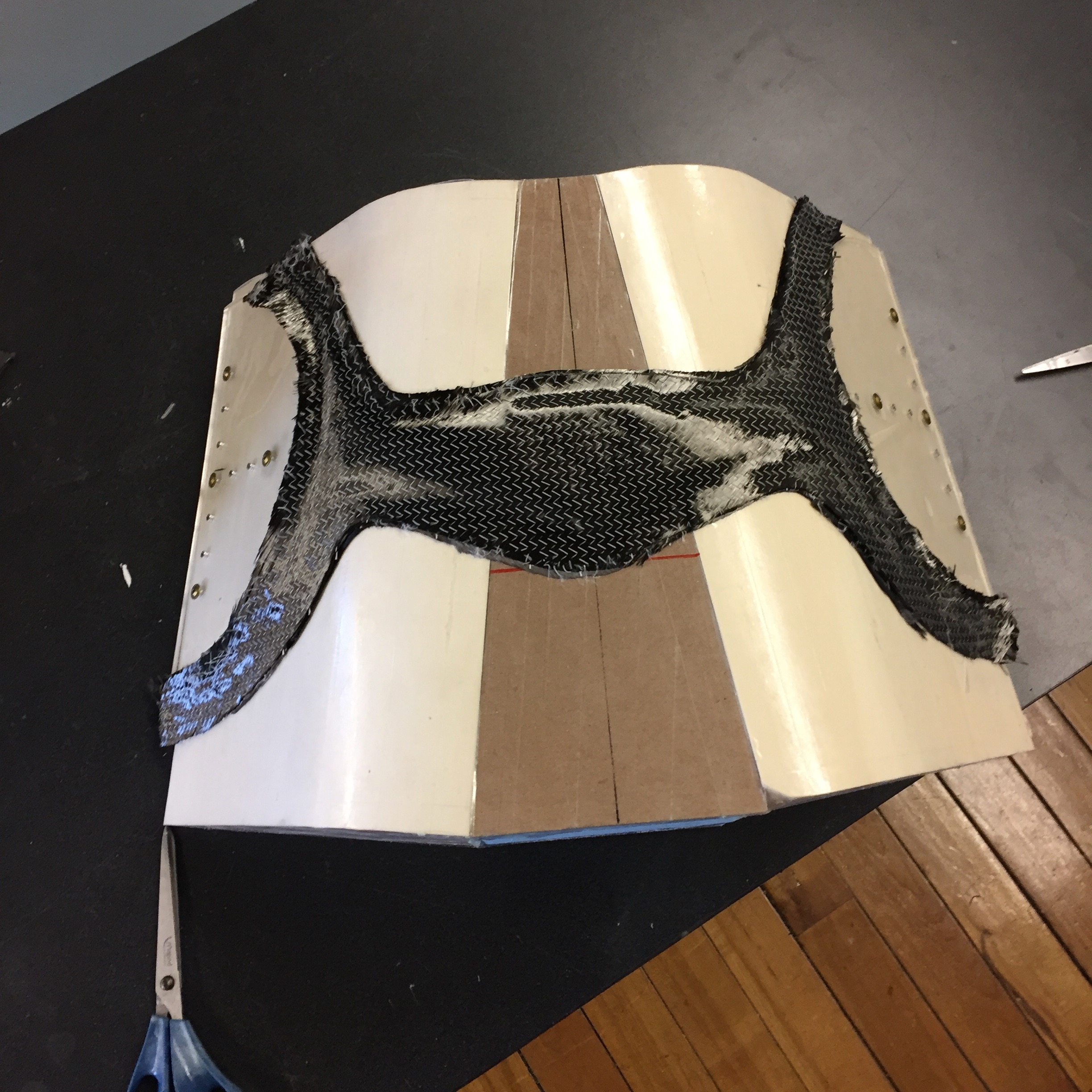

Process photos








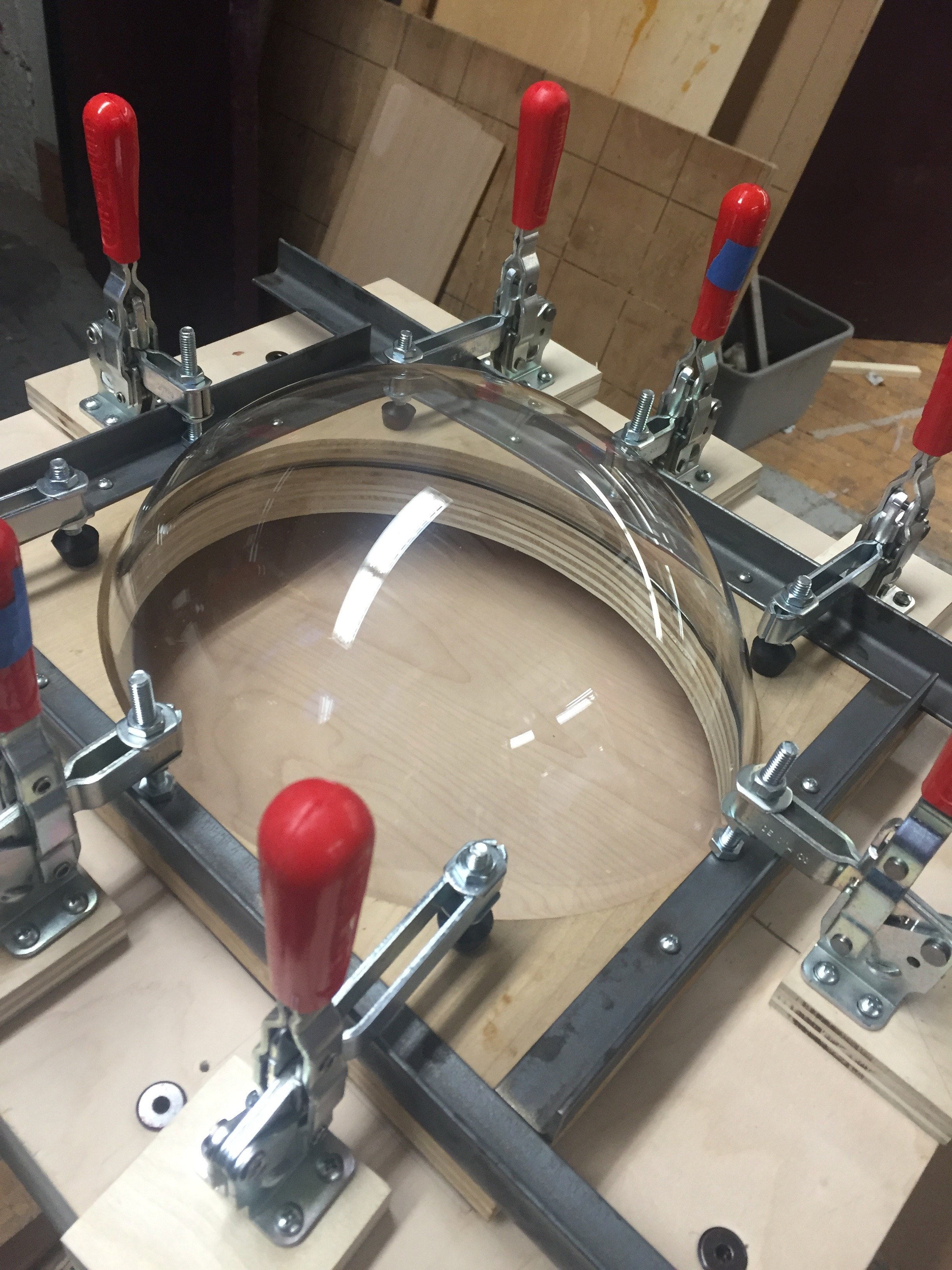
The socket is an interface between human and machine. Due to its imperfection, the health of residual limb and life quality can be compromised. The limb has soft and hard tissue which need to be treated differently within the socket. I was working on the prosthetic socket which is a hybrid of flexible and rigid. Rigid to provide the support, structure, and correspond with the soft tissue on the body and soft/flexible to provide the comfort and protect hard tissued parts.

Experiment 1: Socket out of elastic bungee cord, hot glue gun, ribbon

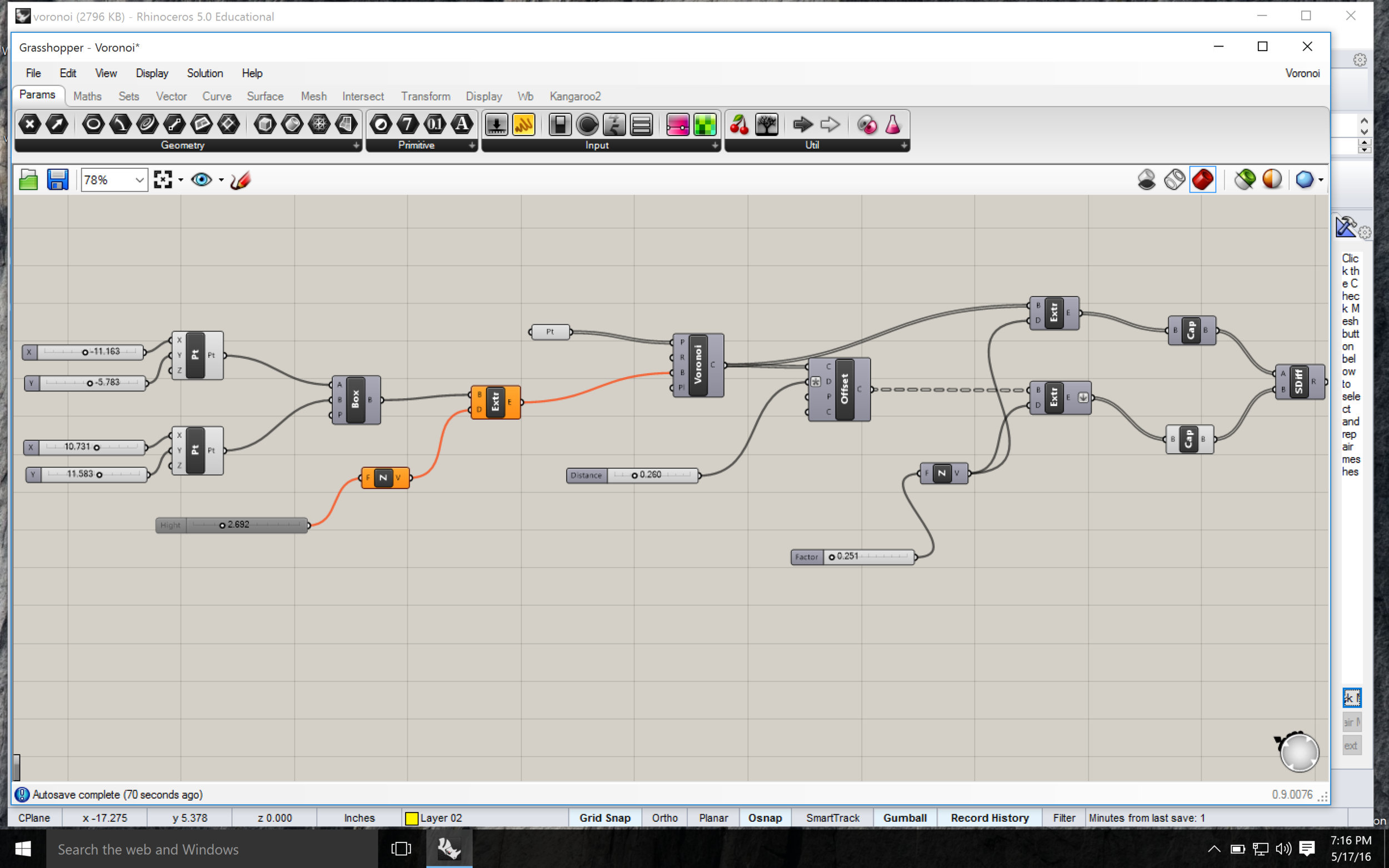
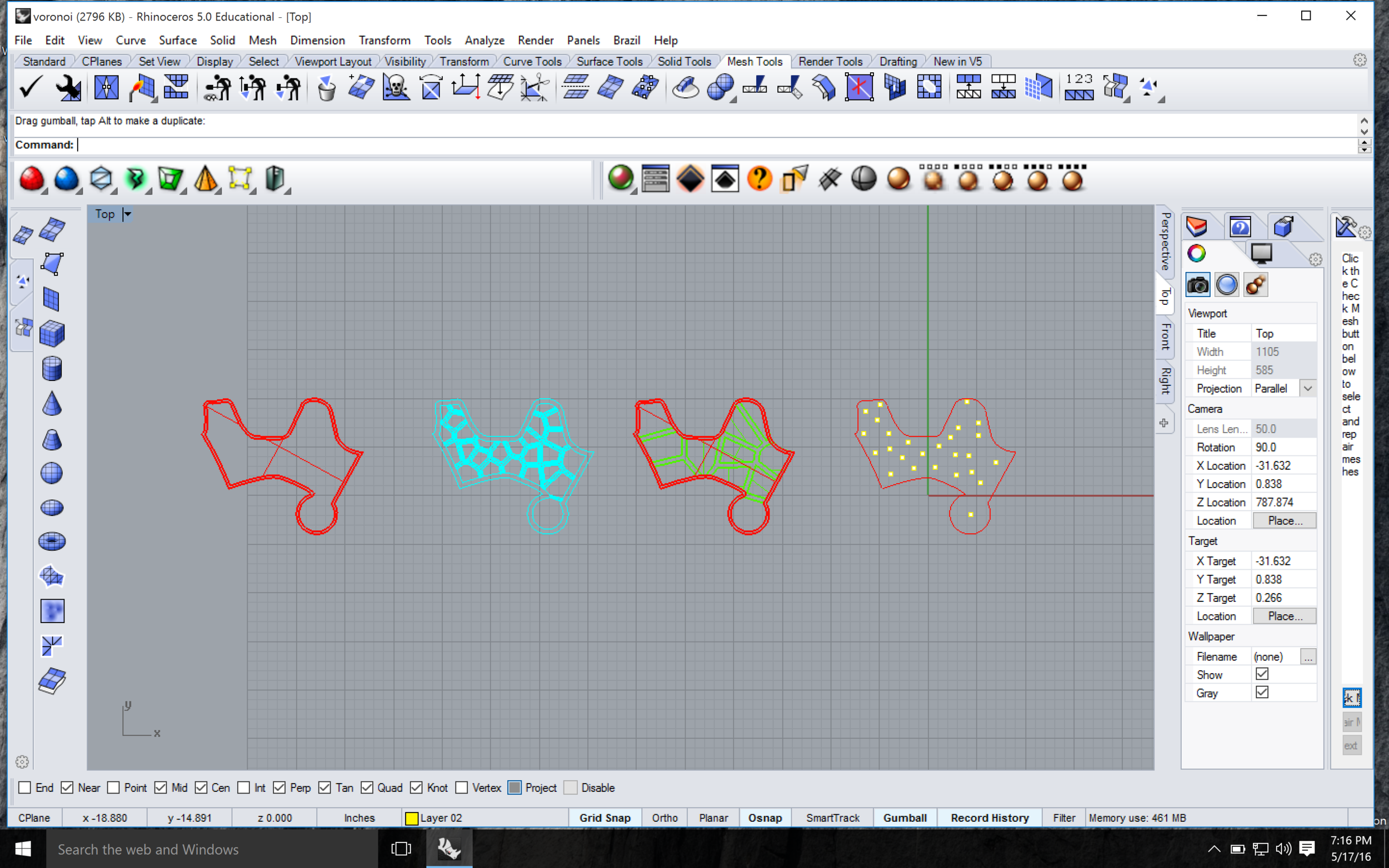
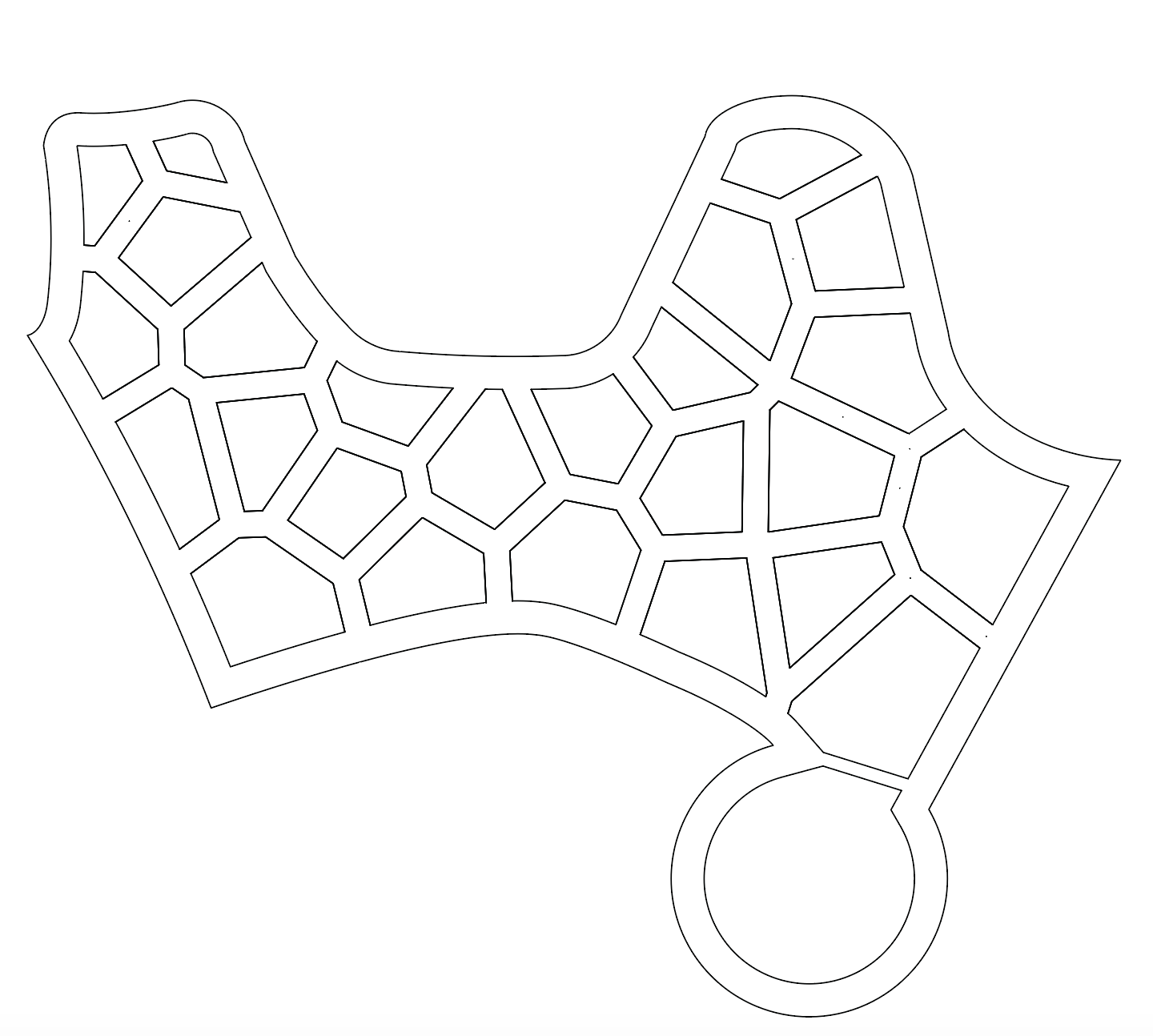
In the next experiment I focused on recognizing the pressure points on the residual limb and translating them into a two dimensional pattern. This pattern worked as a base for an algorithm to create the voranoi diagram in order to build structure which does not intersect with those areas on the limb.



Walking is one of the most basic human abilities. When it comes to the first children’s steps it usually evokes a lot of joy among the family. But there are children with impairments who require more help than a family can provide. By designing the walking aid for children with impairment we wanted to address their needs by making the experience of using it safe and pleasurable.
This project was my bachelor thesis. I worked on it with another student – Małgorzata Małysiak


Walking aid render showing the cambered wheels for stability


Ergonomic features









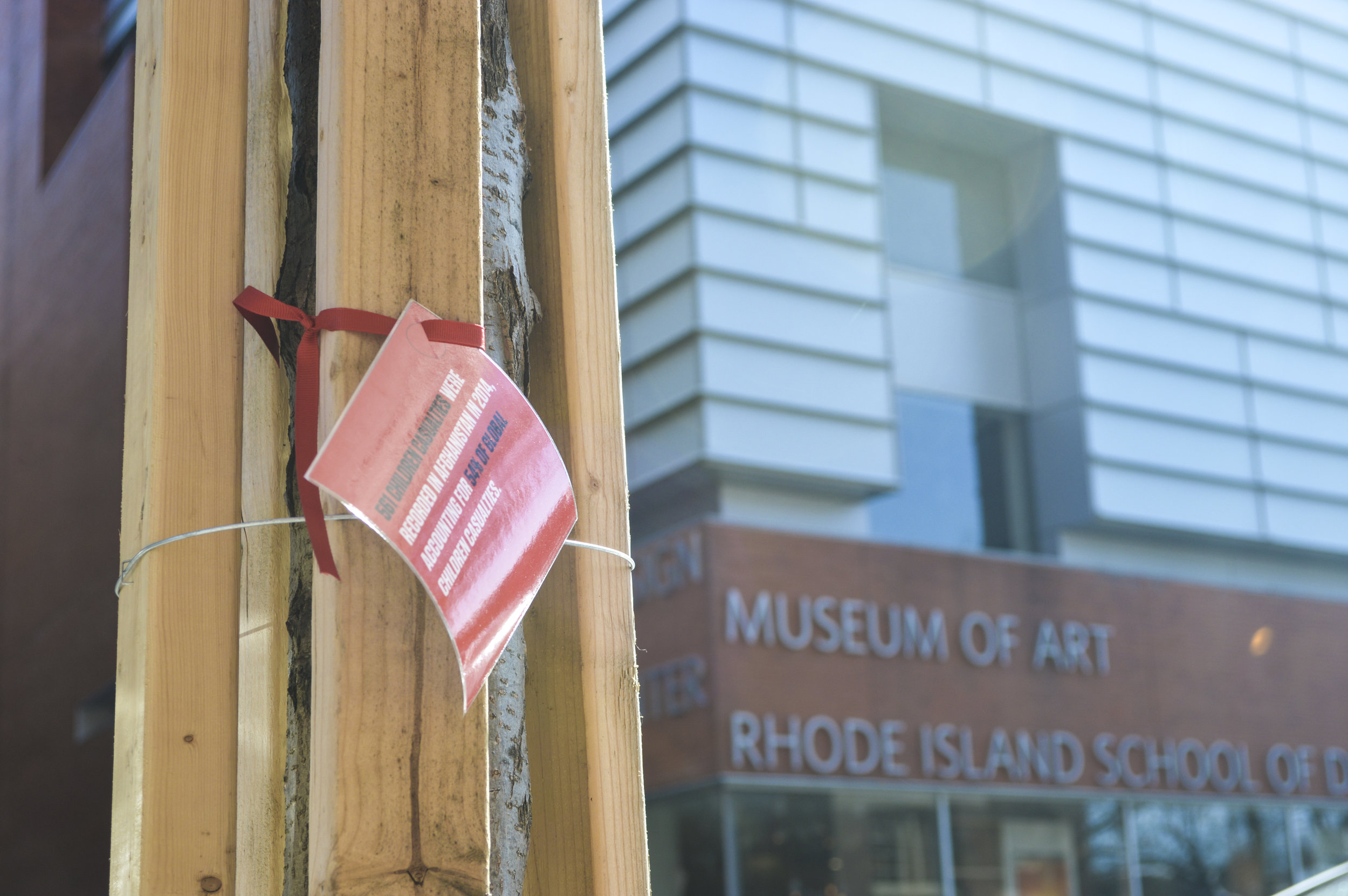
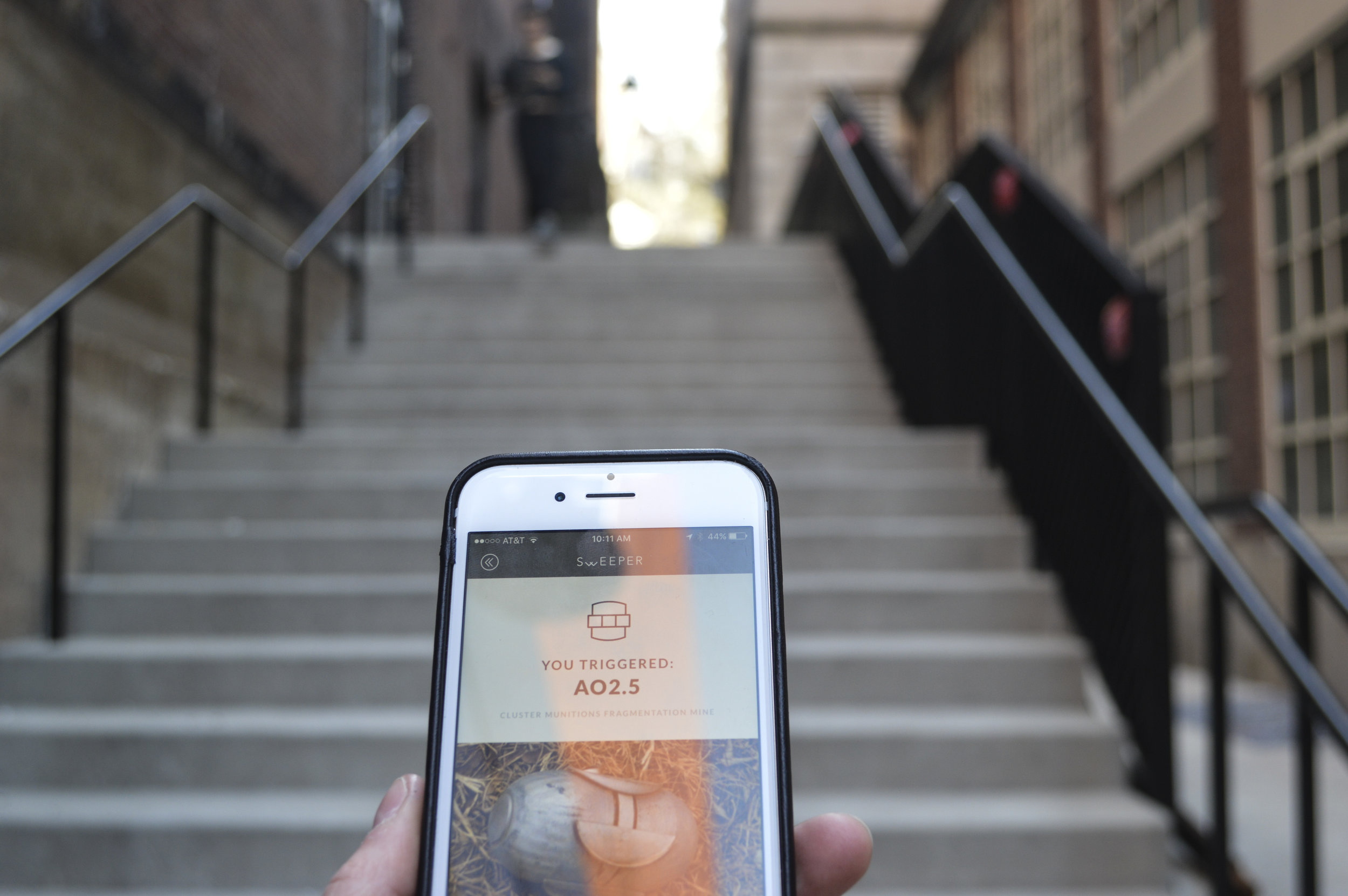
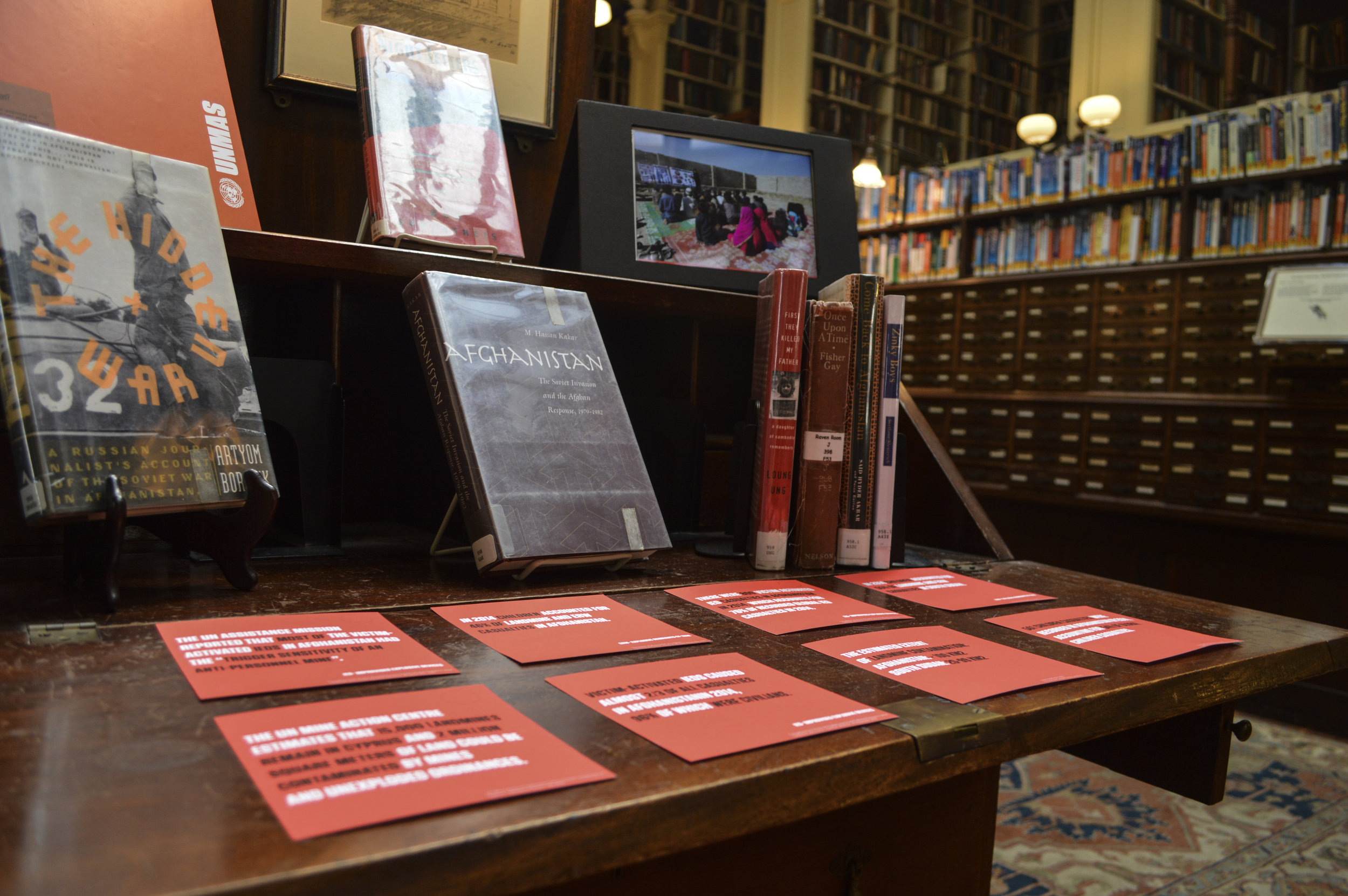
Digital minefield experience created by Critical Mass for United Nation Mine Action Service (UNMAS) installed on the RISD Campus.
Exhibition & Experience Design.